RAANANA, Israel — July 18, 2023—TechnoRobotics Ltd. today announced it has joined NVIDIA Inception, a program that nurtures startups revolutionizing industries with technology advancements.
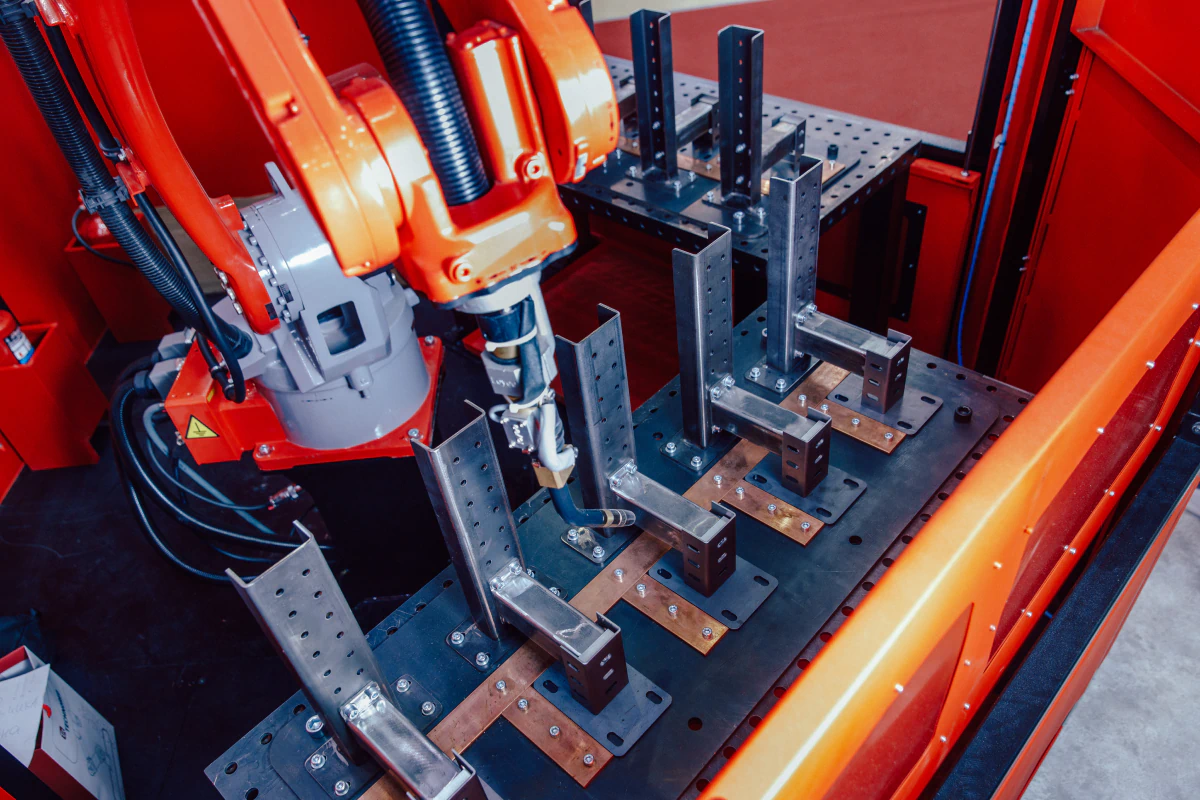
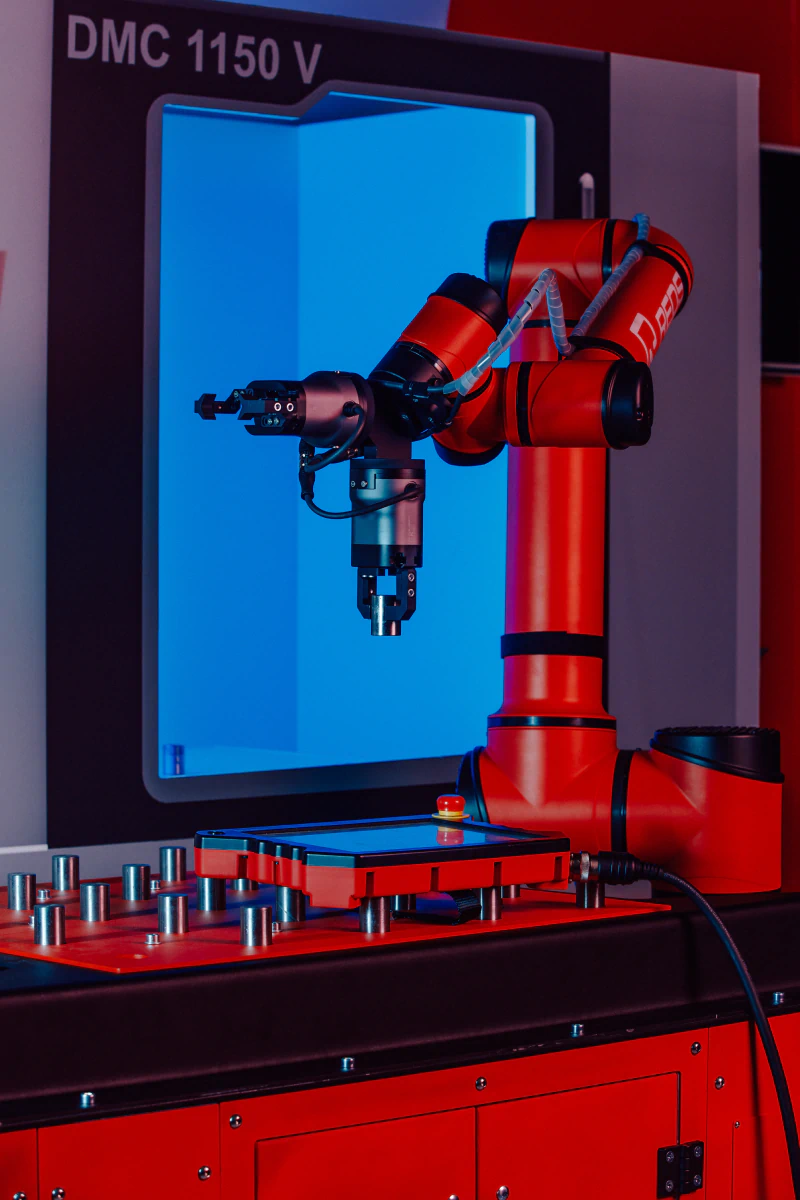
TechnoRobotics is focused on providing state-of-the-art “all-in-one” solutions for intelligent manufacturing, bringing together advanced equipment such as collaborative robots, smart technologies, and customized services to enable businesses to uplift their processing margins while adhering to higher social and eco-friendly standards.
NVIDIA Inception will allow TechnoRobotics to drive its business forward through obtaining engineering guidance, free technical training, and NVIDIA Deep Learning Institute workshops, as well as through implementing NVIDIA technologies in its robotics solutions. The program will also offer TechnoRobotics the opportunity to collaborate with industry-leading experts and other AI-driven organizations.
“By joining NVIDIA Inception, we have tapped into an immense opportunity to combine our R&D with NVIDIA’s products and solutions. Being part of the Inception startup ecosystem grants us invaluable access to a vast knowledge base and state-of-the-art technologies. I am confident that our collaboration will bring immense benefits not only to our own company but also to Israeli manufacturers, providing them with the latest technologies to significantly boost their operational efficiency,” said Marina Fliamer, founder of TechnoRobotics.
NVIDIA Inception helps startups during critical stages of product development, prototyping, and deployment. Every NVIDIA Inception member gets a custom set of ongoing benefits, such as NVIDIA Deep Learning Institute credits, marketing support, and technology assistance, which provides startups with the fundamental tools to help them grow.
About TechnoRoboticsTechnoRobotics Ltd. from Israel is at the forefront of this technological shift. Our state-of-the-art “all-in-one” solutions for intelligent manufacturing bring together advanced equipment such as collaborative robots, smart technologies, and customized services, enabling businesses to uplift their processing margins while adhering to higher social and eco-friendly standards.
Media Contact:
TechnoRobotics
Marina Andreev
marketing@techno-robotics.com
+972-052-622 36 12














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}